You can write your topic however you want, but you need to answer these questions:
Goal - stop my pathfinding NPC from getting stuck when it is forced to explore paths that make it temporarily go further away from its target.
-
What is the issue? Include screenshots / videos if possible!
Below is a screenshot of the grid setup that I have for pathfinding and item placement in my game:

When the NPC is given a path with obstructions that do not require much moving from the desired path, like below, then the NPC does very well.

However, when there is more of a U shape blockade for the NPC, as seen below, the code freezes the game because it loops so many times trying to find a path but doesn’t.
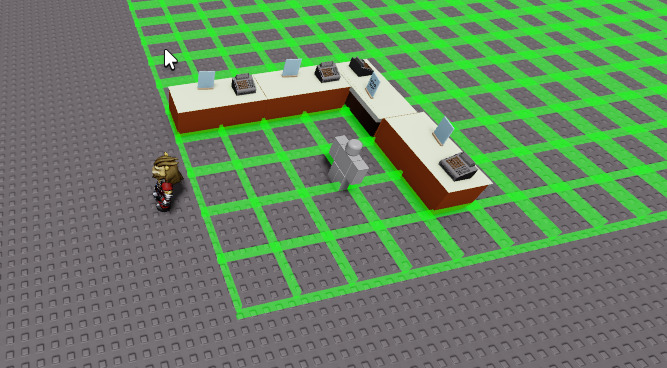
I think the issue has something to do with the NPC not being willing to explore paths that initially take it away from its target. Keep in mind in all these screenshots the target is in the top left corner of the grid.
- What solutions have you tried so far? Did you look for solutions on the Developer Hub?
So far, I have attempted numerous adjustments to the weighting of the heuristic values (I am using the a* algo). I have implemented a revisit penalty so the algo is disinsentived to return to already explored squares, thus making it harder for it to get stuck, but that doesn’t seem to work either.
Below is the main function that handles the pathfinding
--both goal and start are 3 element tables, containing the plotnumber, 2d row index for the grid, and 2d --column index for the grid.
function Algorithms.AStar(start, goal, grid)
local baseHeuristicWeight = 1 -- Base weight for the heuristic
local heuristicWeight = baseHeuristicWeight
local dynamicWeightAdjustment = 0.05 -- Amount to adjust the weight
local maxIterationsBeforeAdjustment = 750 -- Iterations before adjusting weight
local iterations = 0
local Frontier = PriorityQueue.new()
local Explored = {}
local gScore = {} -- Actual path cost from start to current node
local visitCount = {} -- Revisit penalty tracker
local revisitPenalty = 0 -- Penalty for revisiting a node
Frontier:Push(start, 0)
gScore[start] = 0
while not Frontier:isEmpty() do
iterations += 1
if iterations % maxIterationsBeforeAdjustment == 0 then
heuristicWeight = math.max(heuristicWeight - dynamicWeightAdjustment, 0.1)
warn("HeuristicWeight has been adjusted! " .. heuristicWeight)
end
local current = Frontier:Pop()
-- Check if goal is reached
if current.row == goal.row and current.column == goal.column and current.plotNumber == goal.plotNumber then
-- Goal reached, reconstruct path
local path = {}
local temp = current
while temp do
table.insert(path, 1, {temp.row, temp.column})
temp = Explored[temp]
end
return path
end
local neighbors = GetNeighbors(current, grid)
for _, neighbor in ipairs(neighbors) do
local nextNode = neighbor
local newGScore = gScore[current] + Heuristic(current, nextNode) + (visitCount[nextNode] or 0) * revisitPenalty
if not gScore[nextNode] or newGScore < gScore[nextNode] then
gScore[nextNode] = newGScore
Explored[nextNode] = current
local hScore = Heuristic(goal, nextNode) * heuristicWeight
local priority = newGScore + hScore
Frontier:Push(nextNode, priority)
visitCount[nextNode] = (visitCount[nextNode] or 0) + 1
end
end
end
return nil -- No path found
end
Please do not hesitate to ask more questions if you believe that would help you help me ![]()
Thanks - Sasha