This module is one of the first modules that use IKControl for footplanting, if not the first, and is fully customizable.
It can give footplanting to any chain of limbs, using 2-3 attachments and a few values.
How do i make an IK leg?
First, get a leg. (of course)
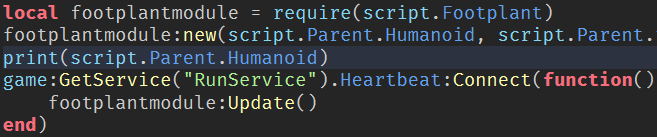
Then, rig the leg. Now, make a script, and require the module on it.
To create a new leg, type out footplantingmodule.new() and put in the values.
stepposition is the maximum distance a leg can travel before going back to the target.
stepup is the offset the leg gets when it takes a step.
target, cur, root, endeffector and pole are attachments of the root of the leg. (Pole is optional) (root is ChainRoot, cur is LerpingPosition, target is IK Target, endeffector is the endeffector)
then connect a function to the heartbeat of runservice, updating each leg you created in the script with leg:Update() Footplant.rbxm (1.4 KB)
I just recently tested your module and I don’t think I have enough instructions on how to use it because I keep getting an error. would you mind helping?
This only works for one leg (both legs move in same direction)
Your module only plants the foot and doesn’t really “walk” because it gets set back to below the character after it reaches MaxDist. It doesn’t make a full walking motion.