I was in the middle of making a chasis for a car system I was going to script and I ran into a problem. The HingeConstraint ( ActuatorType set to Servo) used for angling the wheel for turning was flying back and forth, not actually staying at the angle defined by TargetAngle.
Here I have set the TargetAngle to be 0, (after setting it to 30 first), as you can see it doesn’t stop at 0 when it’s supposed to but rather flies back and forth past where it’s supposed to be.
Video: (TargetAngle 0 is marked by the blue line, green lines represent the angle limits set on the servo)
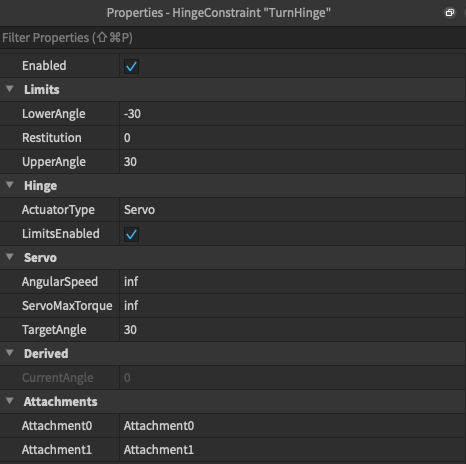
Properties:
(in the above video TargetAngle was set to 30 then 0, but the effect still happens no matter what once the target angle has been changed from the 0 default to any other angle.)
Here is a place file where you can test and try to diagnose the problem yourself:
bouncyhingeconstraint.rbxl (200.9 KB)
For whatever reason I can’t seem to make this stop, all my other HingeConstraints are working just fine but no matter what I do this one is acting all weird by not going to the TargetAngle that I apply. Please let me know if you have any ideas that could lead to a solution.