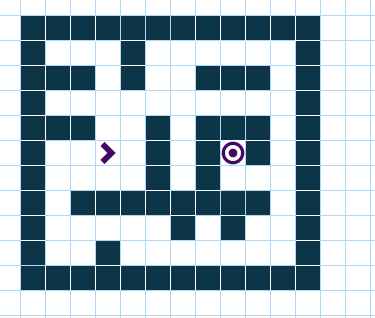
For simplicity we will consider this map as the data you need for pathfinding just so we are on the same page.
Pathfinding at it’s core is rather simple. We start at the starting point, and we ask what neighbors it has that we can move to (so which tiles are next to it that aren’t walls or traps or something). Then we look at all those neighbors we found one by one and ask the same question again, what neighbors does this have that we haven’t already looked at? You just keep checking neighbors and neighbors of neighbors until eventually, one of these neighbors is the goal.
Generally we have 2 lists to help us keep track of these neighbors. An openList which is where we put neighbors we have found but not processed. And a closedList which is where we put neighbors we have processed (found it’s neighbors already).
So the first tile, the start is going to be the only thing in the openList to start. You want to keep looping while the open list has tiles. First in this loop you want to pull the first item in the openList out of the openList and add it to the closed list. Then you want to check if this tile is the exit. If it’s not the exit, you want to add all of it’s neighbors to the openList IF it doesn’t exist in the open or closed list already (since any tile is it’s neighbors neighbor, you need to be able to filter out tiles you are checking or have checked).
Breadth first let’s us simplify the algorithm a little since we can’t end up finding shorter paths to a tile we have already found. In some algorithms like A*, you will need to worry about that though and have a way to update tiles to the shorter path when you find it. We don’t need to worry about it here though.
Anyways, every tile you add to the openList needs to have 2 pieces of information about it. Where the tile is (so you can know where to move, and so you can check that it doesn’t already exist in either list). You also need a reference to the parent tile, which is the tile it came from. When you find the exit, you basically just walk backwards along all the parent tiles until you hit the start again which let’s you construct the path.
For a visual aid, I recommend checking out this site (it’s where that first image came from)
https://clementmihailescu.github.io/Pathfinding-Visualizer/
The algorithm you are probably interested in would be Dijkstra’s and I recommend setting the speed to slow so you can see how it’s processing all of the neighbors over and over again.
Grids of course are used for pathfinding like we use in this example, but they aren’t perfect for every situation, you can create a graph of nodes, or you can create something called a navmesh. They all share the same general algorithm though of recursively searching through valid neighbors until you find a path. These approaches are more complex, but also more powerful in how they can describe where players can move. They however are much harder to get the data for. Roblox generates something like this behind the scenes for it’s own pathfinding, but sadly we can’t access it.
And keep in mind pathfinding can be a bit complex, but it’s very cool when you get it working. I wish you luck and feel free to ask me if you need any help or clarification.

