Im making suspension for my tank but its just broken, i followed this YouTube video and it keeps doing this

or this
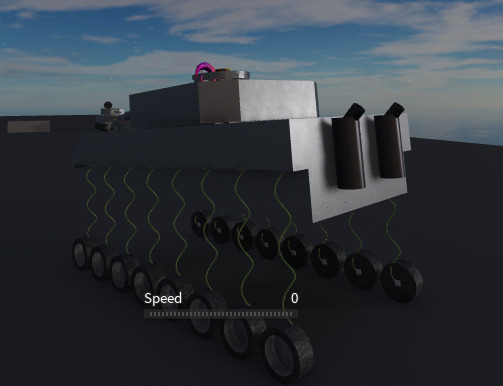
also you can see in the first pic that the suspension doesnt effect the tanks position, how would i add that?
Im making suspension for my tank but its just broken, i followed this YouTube video and it keeps doing this
or this
also you can see in the first pic that the suspension doesnt effect the tanks position, how would i add that?
Not exactly sure what you are trying to achieve, but you might need to reduce the “freelength” attribute. I’m assuming you want your tank closer to the wheels/tracks, and reducing “freelength” might achieve that
Yes but i also want the tank to react to the wheels so it moves/bounces around like a real vehicle
allso when i change the freelength the springs dont have any stiffsess anymore
So can you help me with this/fix this?
All I can think of is to change the stiffness, I don’t really use springs much. Play around with all the values until you find out how you like it.
Does the tutorial involve a BodyGyro or AlignOrientation? If so, make sure that it does not align the tank X or Y.
No I currently only have the springs
Can anybody help me with this?
Increase the stiffness in the spring properties.
i tried that, still doesnt work, maybe its the drving system that causes this
angularVelocity.Attachment0 = script.Parent.PrimaryPart.Attachment0
linearVelocity.Attachment0 = script.Parent.PrimaryPart.Attachment0
linearVelocity.RelativeTo = Enum.ActuatorRelativeTo.Attachment0
angularVelocity.Parent = script
linearVelocity.Parent = script
angularVelocity.MaxTorque = script.Torque.Value
linearVelocity.MaxForce = script.Acceleration.Value
turretSeat:GetPropertyChangedSignal("Steer"):Connect(function()
angularVelocity.AngularVelocity = Vector3.new(0,-turretSeat.Steer * script.RotSpeed.Value,0)
end)
turretSeat:GetPropertyChangedSignal("Throttle"):Connect(function()
linearVelocity.VectorVelocity = Vector3.new(0,0,turretSeat.Throttle * script.Speed.Value)
end)
Yeah, it looks like that’s the problem. You need to limit the angular force on only the Y axis.