Ok so if i were you, what i would do is
use some projectile motion physics in order to do this:
how i would use it is basically make an equation for the velocity each second,
assuming the pull force is just gravity, you can achieve something like this:
however this may be tricky because you’ll need to do this on 3 axis (x,y,z)
you give it an initial acceleration or velocity
local function primitive(t)
local Initial = ... -- u set this to a table that contains (x,y,z) accelecrations: like { acc = {x=0, y=-workspace.Gravity, z=0}}
local g = Initial.acc.y -- the pull force
local a_x = Initial.acc.x
local a_z = Initial.acc.z
return {
a_x*t + v_x0, -- v_x0 is any value u want as initial velocity
g*t + v_y0, -- v_y0 is any value u want as initial velocity
a_z*t + v_z0 -- v_z0 is any value u want as initial velocity
} -- this table now contains velocity values that we will now use to cast the projectile
end
now we’re going to apply the velocity values we got to a velocity vector
we’ll use assembly linear velocity for this
local RS = game:GetService("RunService")
local start_time = os.clock() -- this is when we start the projectile cast
local time_ = nil -- this value will keep track of the time that will update each second
local object = ... -- the projectile object
RS.RenderStepped:Connect(function(dt: number) -- we connect it to a render step
time_ = os.clock() - start_time
local velocity_equations = primitive(time_)
Object.AssemblyLinearVelocity = Vector3.new(
velocity_equations[1], -- x component
velocity_equations[2], -- y component
velocity_equations[3] -- z component
)
end)
now that we have that setup, the projectile should start moving, if you want to predict its path all you have to do is calculate the trajectory time of flight, then solve to get the correspondant time value
which we will then use in the primitive function and predict where it should land
getting the trajectory length is very simple, all you have to do is:
apply that equation and get the flight time,
local U = math.sqrt(velocity_equations[1]^2 + velocity_equations[2]^2 + velocity_equations[3]^2)
local two_d_norm = math.sqrt(velocity_equations[1]^2 + velocity_equations[2]^2) -- magnitude of U in the 2d plane (x,y)
local angle = math.acos(velocity_equations[1]/two_d_norm) -- 𝜃 we can get this on the 2d (x,y) plane no need for the z component
local g = -workspace.Gravity
how we got the angle of the trajectory can be explained by this picture:
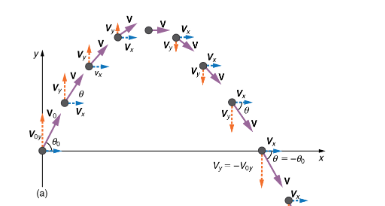
while the Velocity vector is composed of two component here Vx, Vy, finding the angle
Vx = cos(thetha) → using trignomoerty we can get the angle itself
ok, now that we have the time we just have to insert the value we found in the primitive function
then you can go from there, here’s a good resource for projectile motion
if you need more explanation, i’ll elaborate if ur going to use my method because this is still not a complete guide on proper projectile motion mechanics
https://courses.lumenlearning.com/suny-physics/chapter/3-4-projectile-motion/
hope u understand 


